- about RC servo motors
Author's note; reading this white paper takes about 30 minutes. And as such, I’m leaving out a lot because any discussion of motor design and manufacturing technology that runs to less than 300 pages of 6-point type automatically means we're leaving out a lot. In fact, entire careers can be dedicated to just this one subject!
If you haven't got 30-minutes, 1-minute of eyeballing the 1st three photos will get you to 90% understanding. Spend 5 minutes on all 33 photos gets you to 95% of the content from just the show-and-tell.
Another 1% comes from reading Part 1 while reading through Part II gets you to 97%. Go through Part III gets you to 98% understanding. Of course, as every experienced modeler knows . . . that last 2% means you only have 90% to go!
This information is dense because it's a difficult subject. Might couldn't adequately cover it in a semester-long college course! What this 30-minute read 'will' give you is a solid technical understanding of the factors involved in making good decisions regarding what's best for you before investing in your next set of servos - even if you favor a competitor!

Part 1 - 5-min read - on manufacturing and the impact regarding motors costs
There's no surprise a motor inside your servos is what converts the electricity from the battery into the force that powers your servo's control horn, right? The real question is; what kind of motor is inside. Is it; DC, coreless, or brushless? What follows holds true for any RC model servo you buy - from anybody! Yes, regardless of whether it's from Futaba, Savox, Hitec, or ProModeler it has one of these 3 types of motors inside! The point being, this article is good reading no matter what brand of servos you favor! Anyway, let's delve into the subject and find out more!

- Sorting them from DC, to coreless, then brushless orders them by price.
Note; DC motors have been around the longest and cost the least. And technically, DC-motor is a misnomer. DC is really more a type because it includes coreless, so it's more accurate to say iron-core instead of DC when referring to a 3-pole motors except DC is the accepted industry nomenclature for ferrite-magnet iron-core motors. Is what it is so please allow me the leeway to use DC-motors to represent the ubiquitous iron-core motors available in the market, e.g. an ordinary 3-pole. And while we're at it, brushless motors are actually AC motors, but more regarding this, later!
DC-motor servos: What's most important to know about DC-motors is that they are - by far - the easiest to make and thus, they're the cheapest. Basically consisting of a bit of copper wire coiled around iron cores for the electro-magnet, a can lined with a ferrite permanent magnet, plus a commutator ring and brushes (to switch the fields). Along with a way of holding the shaft at each end, you've got a DC motor that's very cheap and easy to make - and durable, too.
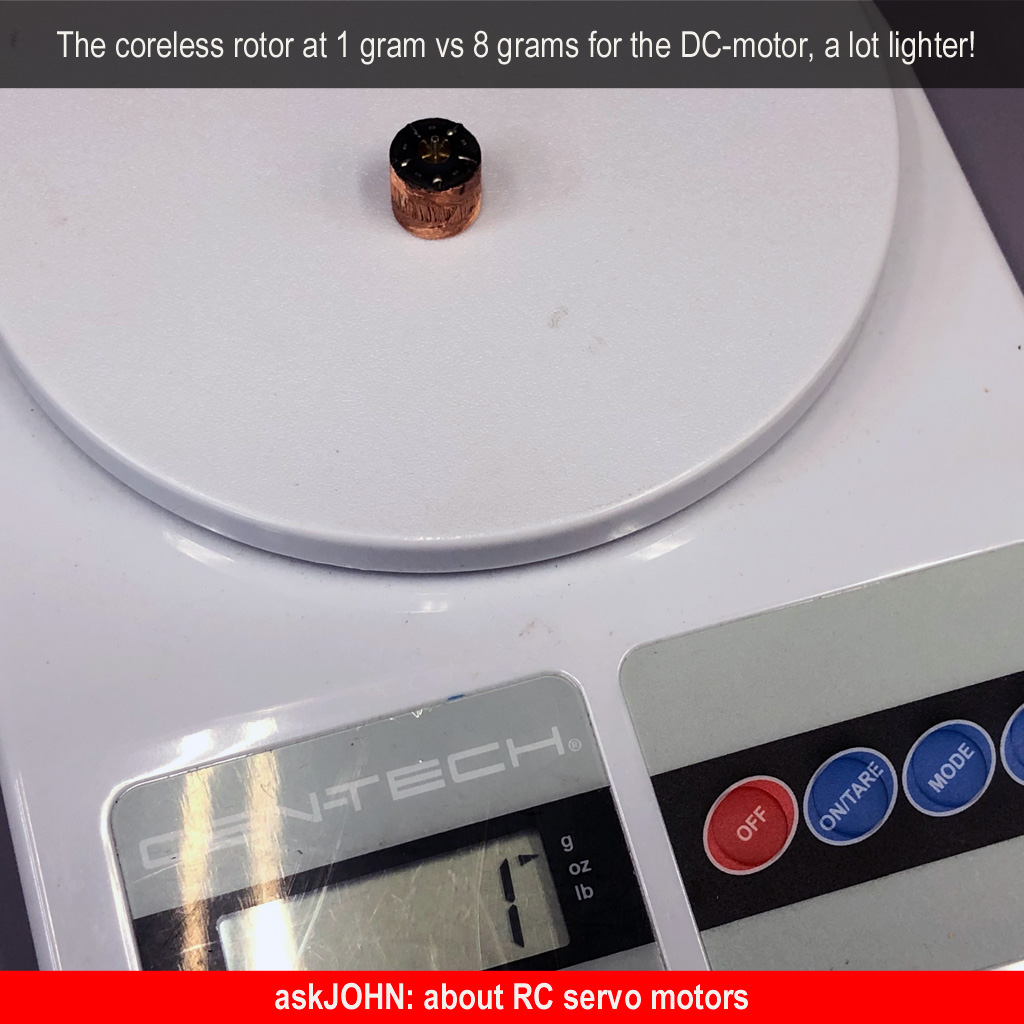
Coreless motors: these are significantly more expensive than DC-motors because of how they're made and because of the materials themselves. Their principal advantage over a DC-motor is they accelerate/decelerate more quickly. This is because of how the windings are made. They're formed on a mandrel (a more expensive process) and rotate without an iron core. As a consequence of the ultralight rotating mass they are very quick to accelerate/decelerate, which is 'the' performance benefit. Commutation (field switching the windings) is mechanical - similar to how it's done with iron-core motors. However, making the delicate basket-like coils (winding) is a separate process that's more expensive (by a lot). Add to it, the permanent magnet is usually an exotic alloy of neodymium and while coreless motors make for faster servos, they are also more expensive to make. Thus, are you surprised you'll pay more for servos with coreless motors? Not if you follow the manufacturing-Benjamins regarding this technology!
Brushless motors: are also called electronic motors and are quite accurately described as pricey! This is because they're manufactured similarly to a coreless motor with respect to the delicate windings and the superior magnets. But beyond mandrel-formed coils and more costly magnets than found in DC-motors, the relatively inexpensive mechanical commutation is replaced by electronic commutation. This brings benefits regarding longevity, and regardless of the direction you approach it, time is always money! Bottom line? Brushless motors are the most costly to make - their use is part of why you pay the most for servos with brushless motors!
So which one's best? For this we need to know; best for who? Best for you? Best for me? And best for what model? In short, when it comes to best . . . the answer is, it depends!
Part II - a 10-min read about what makes DC, coreless, or brushless right for you
If you stopped reading after 5-minutes, you know the basics of what goes into DC, coreless, and brushless motors, and a little bit about why they cost what they cost. That's fine as far as that goes (meaning you'll be fine if you read no further because you now grok it's entirely due to differences in how they're made plus the material differences, which contribute to their price vs. performance).
But there's more to know. A lot more and this requires we delve a fair bit deeper when divining the details regarding the makeup of servo motors. As before, we'll progress from DC, to coreless, and through to brushless - but now in considerably more depth.
Once you've fully digested this section you'll be prepared to make good decision regarding which type of motor is best for you as determined by the technology and your circumstances, e.g. for whichever type of model, how it's flown, and the available budget considerations. Moreover, you'll never again be dependent on someone else to help you because you'll probably be more informed than others about the composition of servo-motors and know how to judge for yourself which is best for you!
DC-motors:
If you want cheapest, then get DC-motor servos - shop around because as a class, servos with DC motors cost the least. Doesn't make them bad, or junky. In fact, they're perfect for maybe 90% of modelers. This is true whether you're a beginner, sport pilot, or seriously into flying enormous giant scale models.
- It doesn't take big money for servos, even for very large scale models!
All these sorts of models; trainers, sport, and scale, are easily controlled by DC-motor servos because the maneuvers they're called on to perform are within the wheelhouse of durable DC-motor servos - of any brand! Bottom line? DC-motor servos are nearly perfect for this type of flying because their characteristics serve the majority of models. Note; DC-motor servos - by their massive nature of construction - offer very high levels of torque. Power is good!
Note: please allow a brief bit of advertising . . . ProModeler offer a 360oz-in DC-motor servo for less than 50 bucks. It's a great servo for a great price. Best thing about it is there are no shortcuts in manufacturing. For example, it's assembled with 10 Allen head machine bolts, has all metal gears, bronze inserts reinforcing the polymer components where steel gear shafts contend with the greatest stresses, has a CNC-machined aircraft aluminum center case with cooling fins for long motor life, and is assembled with 13 o-rings for protecting the assemblies from foreign intrusion - and it even meets three MIL-STDS.
This last is a big part of what makes the ProModeler different. Basically, unlike the usual hobby-grade servos, it's built to meet military standards (and subjected to these tests).
MIL-STD-810G-Part 16
- Shock - Test Method 516.6
- Vibration - Test Method 514.6
- Rain - Test Method 514.5

- A fantastic value, this smooth and powerful servo is a great choice
Meeting these standards is principally due to the requirements of our primary customer. However, because we're modelers just like you - and - because we are as clumsy as the next guy and occasionally knock a servo off a workbench, or have experienced crashes, plus we know a thing or two about engine vibration (and how a summer afternoon pop-up rain shower may drench a model before landing), it means these tests are important for civilian users as well.
So if you're looking at another servo, one which offers similar performance and pricing, but hasn't been tested to military standards, then the question is; which would you rather have? The facts are servos expressly designed to survive the abuse encountered in the non-civilian world are an important ownership considerations for most modelers. While ProModeler may be new to you, we offer this one piece of advice; don't let habit or someone else decide what's best for you . . . acting in your own best interests (and this is always a good rule whether buying servos, or anything else).
Also note; the DS360DLHV is neither unusually expensive, nor cheap (middle of the pack is accurate price-wise). One thing is certain, virtually every model known to man can be controlled with a this 360oz-in servo (regardless of brand, and this servo is built better than most). The real point being; if you consider Chip Hyde won the $50,000 tournament of Champion in Las Vegas with a 44-pound model powered by a 200cc gasoline engine equipped with 195oz-in servos, it's that, yes, you can spend $1200 on servos for a model, but darned few of us can tell the difference versus opting to pony up just $50 each! End of self-serving message.

- With a bellowing roar, and roiling smoke, Chip Hyde wins the TOC
Coreless motors:
What if you want the fastest servos? Then it's coreless motor servos for the win by a country mile! Once you get into a given level of transit speed, sub-0.14sec/60°, then the servos tend to use coreless motors. When the race isn't just one of high torque, but includes an emphasis on speed also, then coreless motors become the choice.
Speaking of speed in servos, speed is costly for the same reason going fastest at Indy takes cubic money! As for why coreless motors cost more, in part it's because of how their coils are made, which allows coreless motors to be so fast when accelerating/decelerating. Added to which, they use superior magnet technology (more costly). So with servos as with anything else . . . more speed means more money!

- Typical coreless motor parts consisting of just a few parts
One thing is certain, pilots flying higher performance models need both power 'and' speed because, for example, that Harrier maneuver everybody oohs and aaahs over (especially when performed down low to the deck) requires extreme speed to time the deployment of the control surface quickly, precisely, 'and' the muscle to shove said extremely large surface against a gale force wind (due to model's forward acceleration). This takes ooomph and speed.

- Note the amount of elevator being deployed . . . astounding!
Brushless motors:
What if durability enters the equation? Electronic motors cost more to make than mechanicals. Basically, you can't replace cheap little bits of metal used for commutation with Hall effect sensors and a logic circuit for the same price. Electronics simply cost more. Added to it, now you need more electronics (the logic) to control the motor in the ways that were once achieved by a metal ring and brushes. Is this worth the added expense? Basically, yes, to many pilots (this is even considered indispensable to some).
Usually adding parts is bad, right? Thing is, electronic motors (brushless motors in other words because Hall effect sensors and a circuit board replace the mechanical commutation) offer a whole new level of flexibility and control to offset this. Added to which, brushless run cooler because the heat of arcing at the contacts is gone. After all, the dust created as the metal of the brushes vaporizes has to go somewhere, and the somewhere is coating the inside of the motor - this is bad for many reasons, heat and fine particles of grit chief amongst them.
When it comes to electronics, heat is never a good thing. Add grit plus small parts and it equals a bad mix. Anyway, this means on average a brushless motor simply lasts longer because they don't have brushes to wear. 5X longer according to MTBF (specifications which can be taken as a reasonable figure).
Painted with this brush; fast, longer lasting, and cooler running, can the numbers for spending $100 vs. $80 be defended? For many guys the answer is yes. Especially if you're an 'in for a penny, in for a pound' kind of guy, or the guy who buys good stuff, tools, etc. secure in the knowledge the good stuff pays off in the long run (e.g. well after you've forgotten the slight differences due to cost). Put another way, price isn't everything.
But honestly, things are easy when you're a single issue buyer. Cheaper faster, more durable - pick one! Things get more complicated when you want cheapest 'and' most durable. Let's see the inside of these types of motor to better understand why the costs factor as they do. For this, let's destroy some. How? By cutting into a few motors with a lathe!
- The lathe makes short work of slicing a motor open to examine
Part III - the 15-min that gets into the nitty-gritty of motor construction
DC (iron-core):
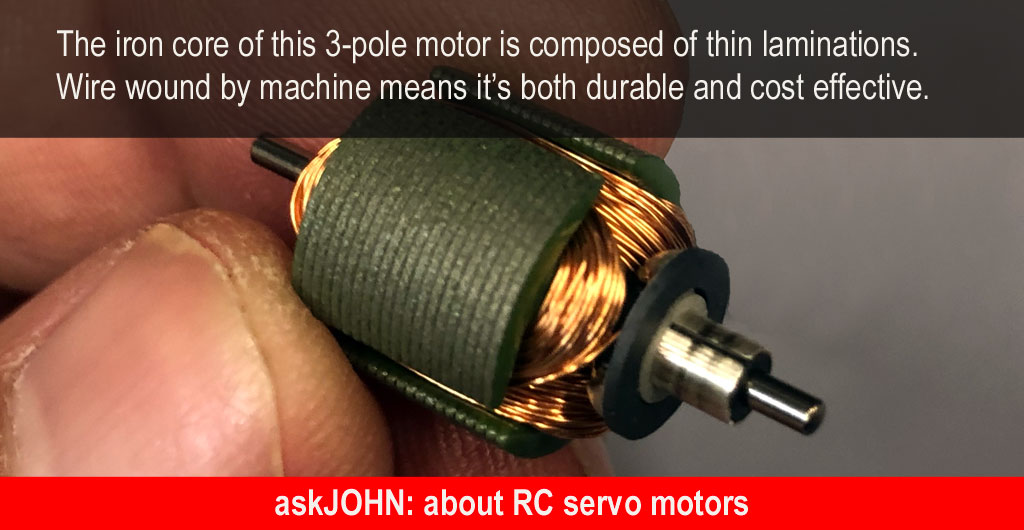
This is a DC-motor once again. This time you're seeing the guts of how they're made. There's a ferrite permanent magnet within the can, and by winding copper wire around an iron core to generate an electromagnetic field, the windings may be sequentially energized to spin the motor.
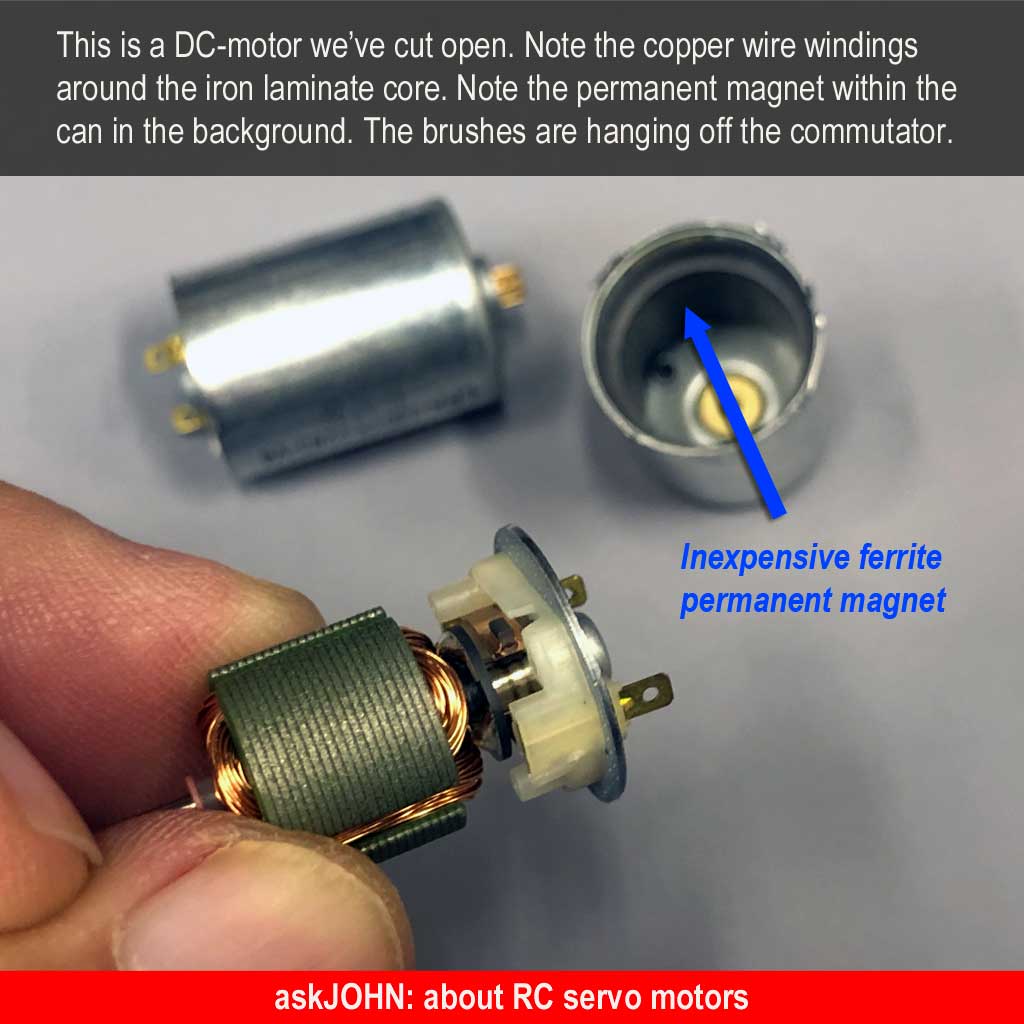
Sequentially turning the windings on, thus making an electromagnet to react against the permanent magnet mounted within the can, is what moves the rotor around and around. Commutation (switching the fields on and off in a sequence) is what times the force that keeps the rotor turning.

The iron core of a DC motor is the heaviest of any type of motor. The rotor core is made of thin sections or laminations stacked together. The thinner the laminations, the lower the iron loses and the more powerful the motor.

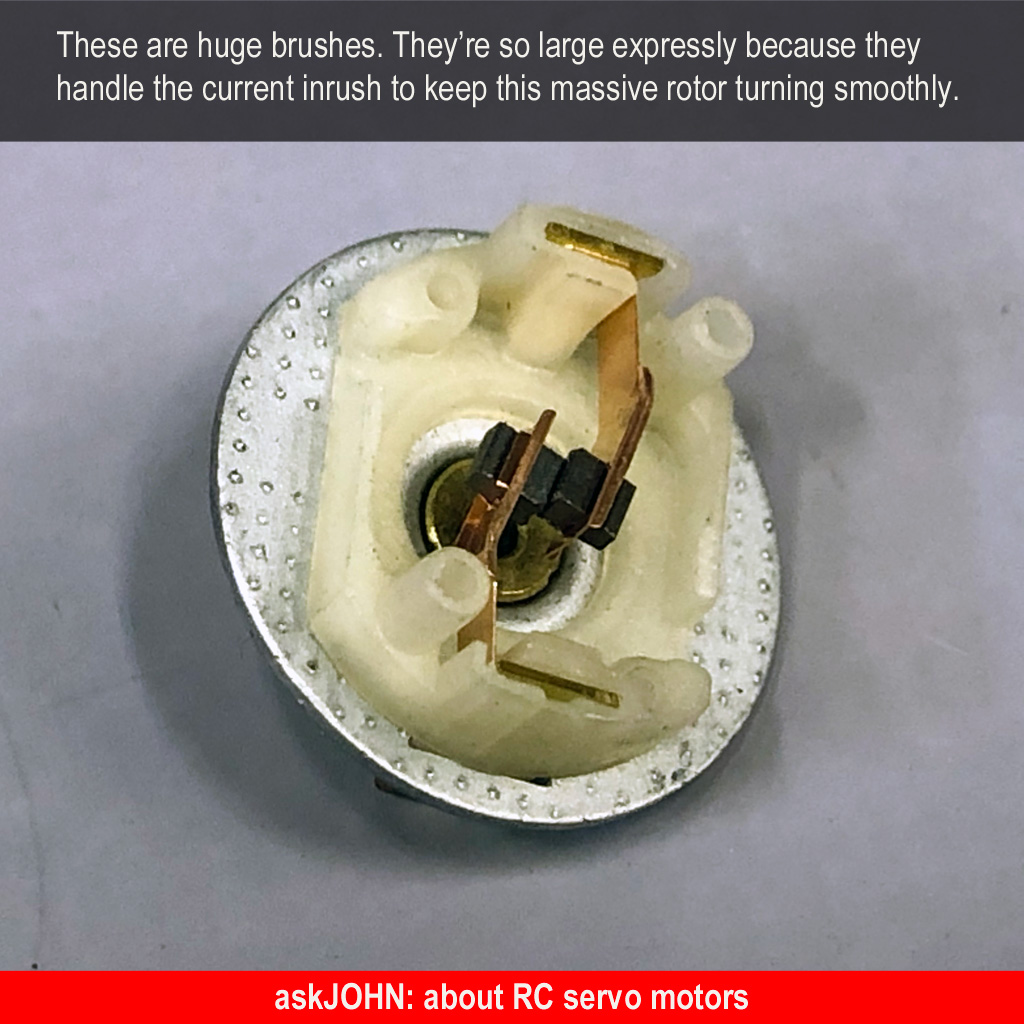
Remember, DC-motors are basically the cheapest to build. In the world of manufacturing, cost trumps pretty much everything. Especially with price sensitive consumers. Fortunately, DC motors are reliable, powerful, and fast enough for nearly any modeling need. This means savvy buyers, even when you can afford brushless, may opt for DC, regardless. Why? It's because it may make better sense for the application. E.g. a scale model where the speed at which an aileron deploys is of little consequence doesn't require a pricier motor within it's servo - fact. Moreover, DC motors are durable too; witness the huge brushes ensuring a long life. Often, the trick to savvy buying is matching the best made servo mechanics along with an DC-motor to get the best deal. But beware of internet experts who can spend your money like water!
Coreless:
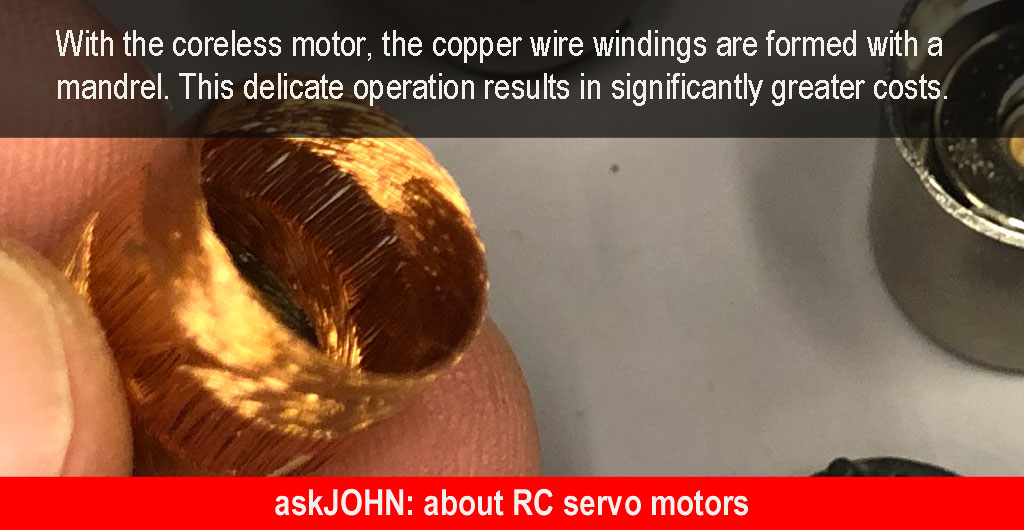
These are the guts of a coreless motor. Note the wire has been wound on a mandrel and once it's retracted it leave a wire basket that doesn't weigh squat - meaning - it's super easy to both accelerate and decelerate . . . this is how you make servos react quickly!
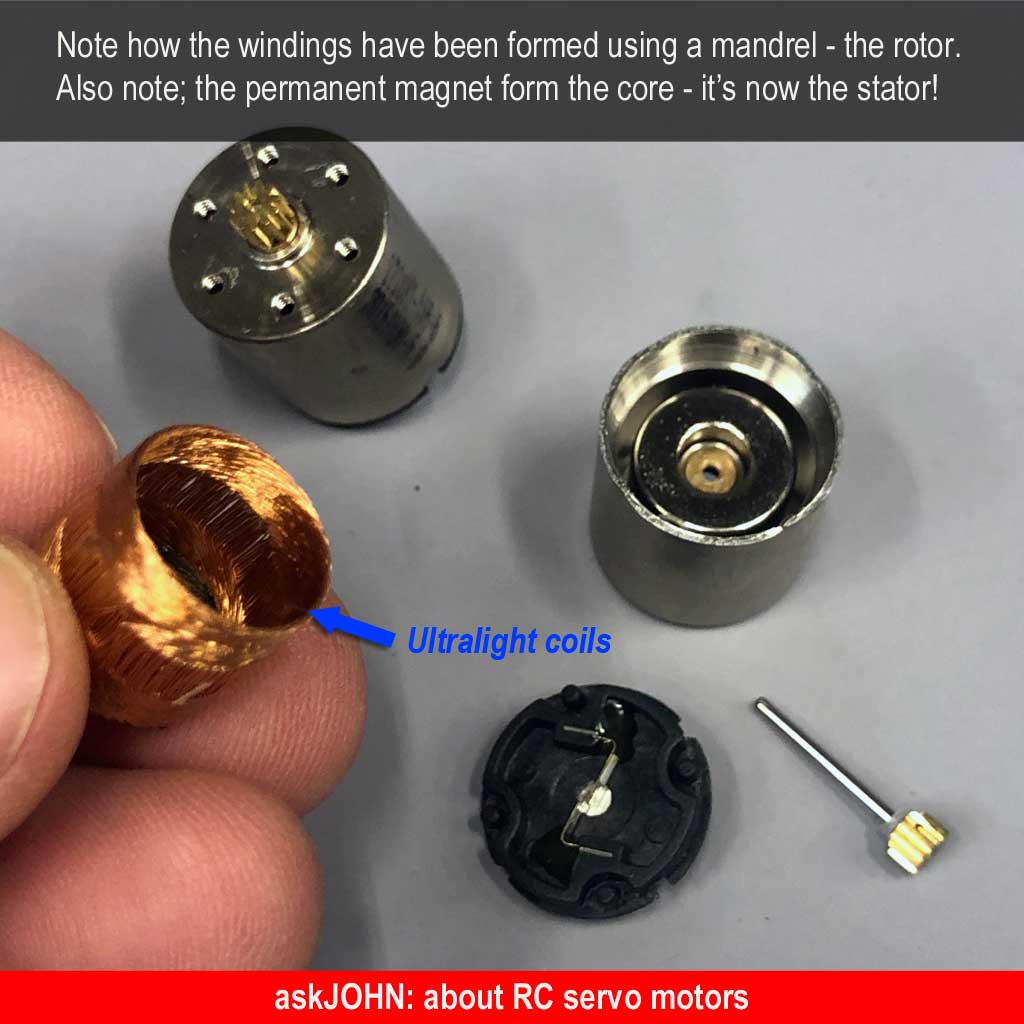
The key takeaway is that these windings without a core simply weigh less. In fact, their mass amounts to a small fraction of what the iron-core within a DC-motor masses, which means it's easier to start and stop moving. Understanding coreless motors' advantage lies in the fact their rotor doesn't weigh jack by comparison. This is why they can be accelerated so much faster than an iron-core DC-motor. But winding these coreless coils costs more. Also more costly is the type of magnet, neodymium, which is part of the lanthanoide series. These are the strongest permanent magnets available commercially and between this and the mandrel formed windings, higher costs versus the ordinary iron-core motors can't be avoided.
Bottom line? If speed matters, coreless beats DC every time because the mass being started and stopped is 'greatly' reduced. Commutation is still mechanical, e.g. with a commutator ring and brushes. This means they wear out eventually. FYI, a good friend, a savvy guy who can really make a dollar squeak tells me the wear issue is why he is happy to buy used brushless motors, but less so coreless servos (because you can't tell how much longer they'll last). Anyway, the brushes on coreless motors are typically a lot smaller.

Coreless motors, due to their reduced mass, require less amperage to start and stop. Thus, their brushes are more compact, e.g. smaller brushes are used. Also, eyeball how they're bent into whiskers so as they wear they maintain good contact with the commutator.

Brushless:
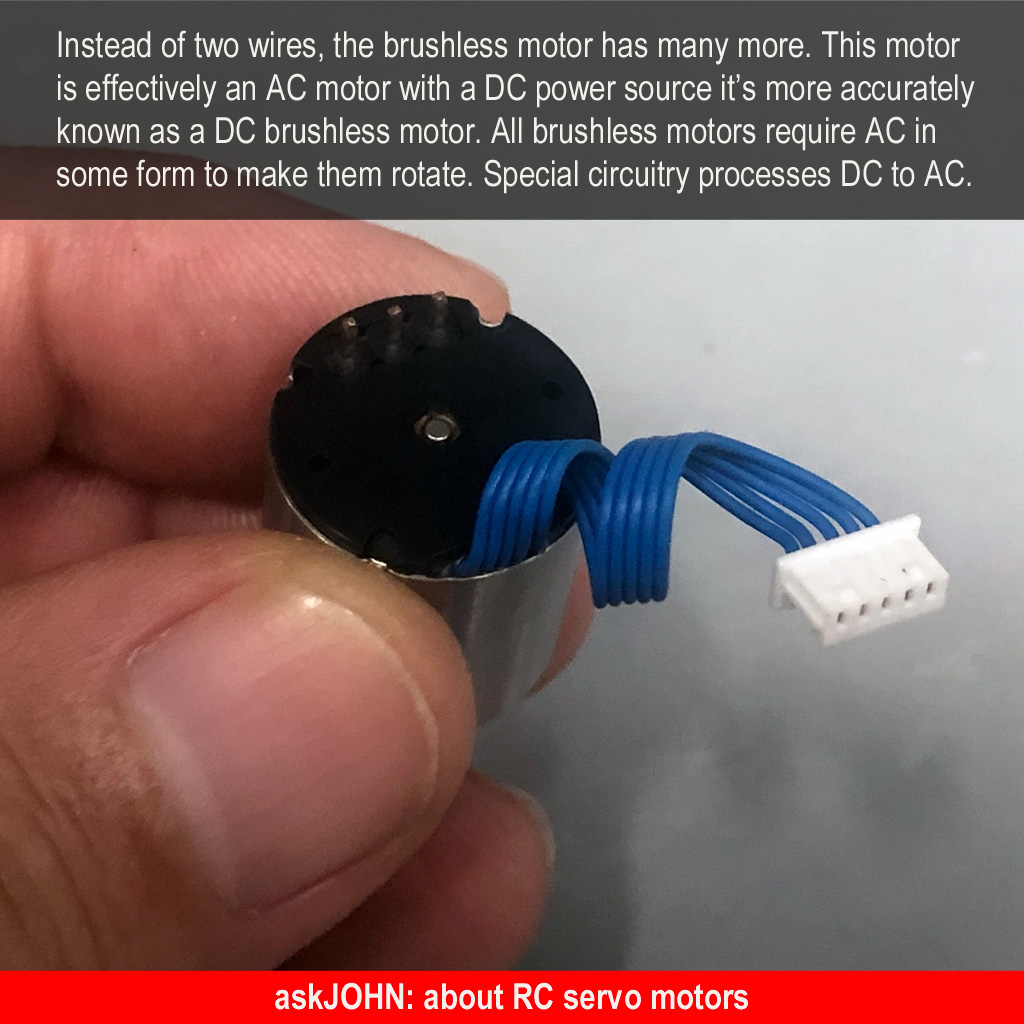
The third and final motor we'll cut open is a brushless or electronic motor. The electronics for commutation versus mechanical bits are why brushless motors are significantly more expensive to make than coreless because otherwise, brushless motors also make use of permanent magnets made from an alloy of neodymium, iron, and boron to form the Nd2Fe14B tetragonal crystalline structure that results in the incredible development in recent years of super servos.
However, while the neodymium type magnets are shared in common with coreless motors, once the relatively cheap to make mechanical parts that make up the commutator ring and brushes are replaced by electronics, costs take another leap higher. And it's a never ending cycle because, for example, the motors are more complex in other kinds of ways, even in terms of the number of wires going into them. For example, instead of two wires connecting this motor, now there are eight!
Next, note brushless motors are also wound using a mandrel. The point being, just like coreless motors, brushless motors are also used for high performance servos because they'll accelerate/decelerate more quickly than iron-core motors (referred to by some manufacturers as ferrite-motors because of their inexpensive ferrite magnets).
Thus, due to their similarly reduced mass, it means a brushless motor also generally eclipses a DC-motor in the speed department (but at a higher cost than coreless because of the added electronics). In this motor, the rotor is magnetic and and the coils are part of the stator - in effect, it's been built inside out! The very low weight rotor plays a role in high performance.
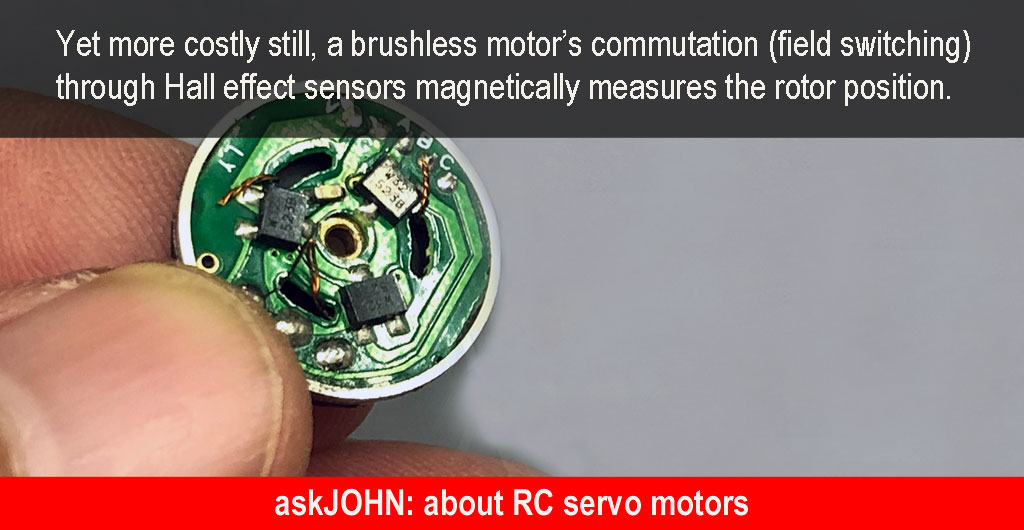
However, it's when we cut this motor apart that reveals something new and different. There are 3 wires connecting to a round circuit board section. Hmmm, what's with this?
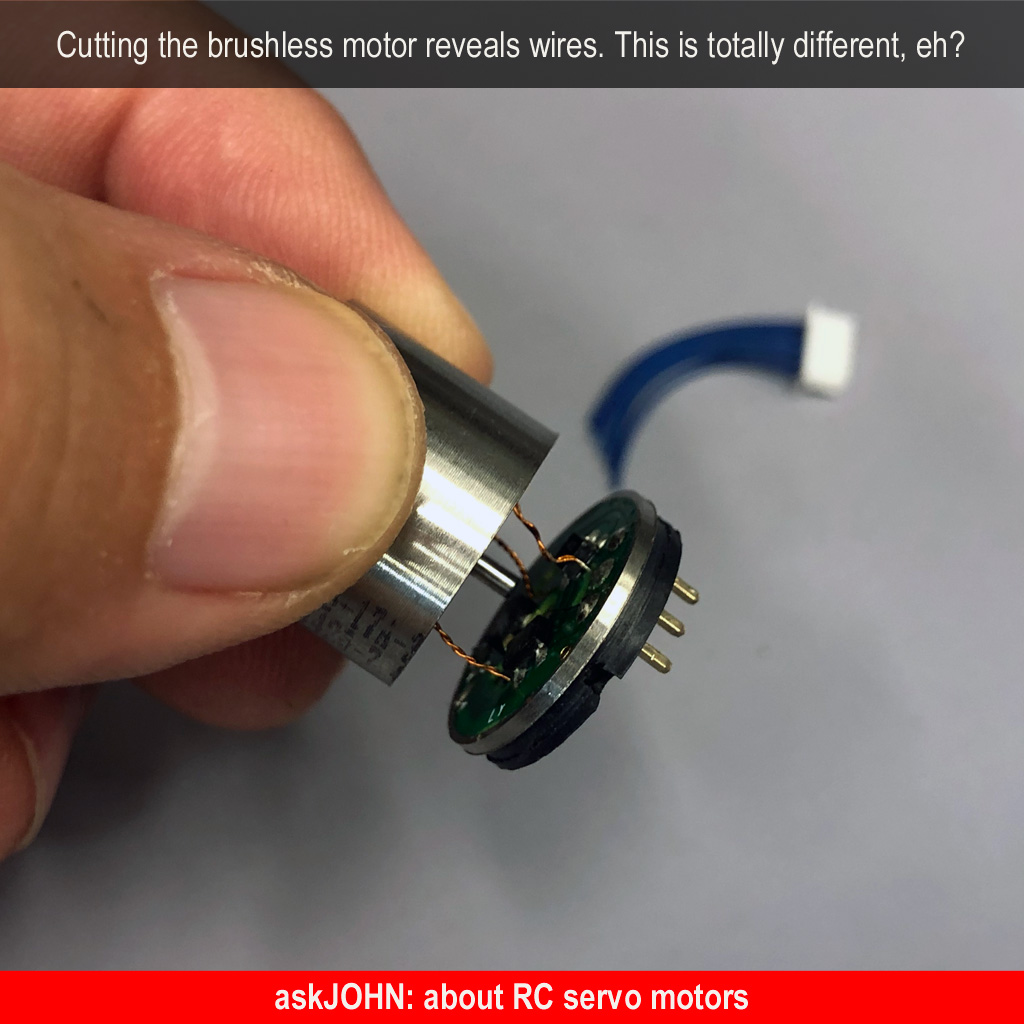
So what replaces the brushes? The answer to that is simple; what replaces brushes are Hall effect sensors. Their output voltage is directly proportional to the magnetic field strength through it. These are usually combined with threshold detection so that it acts as a switch. This is the type of technology also employed within the motors in pricey CNC machines.
Brushless motors are also known as electronic motors. The Hall sensors measure magnetic fields so that the position of the rotor can be computed and the driving voltages to the coils (windings) can be adjusted. Thus, the Hall sensor literally measures the position of the rotor based on magnetic fields . . . meaning all it has to know is which sensor produces the highest reading!

Principal advantage of brushless motors vs. coreless motors is the mere fact there are no brushes to wear out - or what's in a name - duh! This means the motor lasts longer. Much longer. So much longer the folks comfortable with basic math often judge they're worth spending extra for. You? Dunno, your call.
The downside? There's added complexity for electronics, but they're reliable in the grand scheme of things so the real downside is just one . . . cost.
Compare and contrast:
Often, the guy who want the cheapest servos considers $20 a lot of money (and we've heard guys brag about buying a bunch of used servos for $5-10 each). Or brag about a deal they got for new oriental no-name imports for just $12 each - brand new! This guy's not shopping quality, just whether they work! For how long is an open question (and for guys who don't fly a lot, it may not really matter).
ProModeler's least expensive servo sets you back $30, or 50% more than cheapskates are generally willing to pay. Thoughtful consumers weigh the benefits of all-metal gears, Allen-head bolts, o-rings, cooling fins, and make an altogether different calculus in terms of value compared to bottom-feeders. Only 'you' know where your desires for quality fit within the value-spectrum . . . we're not here to judge, just to inform.
- Honestly, dropping $1200 on servos is easy, the trick is in knowing when not to!
Also, and no offense to anybody because we've worked McWages in our past and can squeeze a buck with the best, but the reason we're not going to get into the 'cheapest' possible servo game is because we hold our models too dearly. Thus, whether it's a $150 ARF or a $15,000 turbine doesn't matter. True if for no other reason than because we're modelers exactly like you (meaning we're using these same servos in what we fly or drive). The bottom line reason we don't do cheapo servos is because we have the same skin as you do in the game when we advance the throttle. Put another way, we eat our own dog food! This brings up the questions, should you always opt for coreless or brushless if you're flying 3D maneuvers? No, not really. Well know central-Florida pilot Doc Austin shares these thoughts regarding the teeny-tiny DS100DLHV . . . micro-servos equipped with DL-motors.
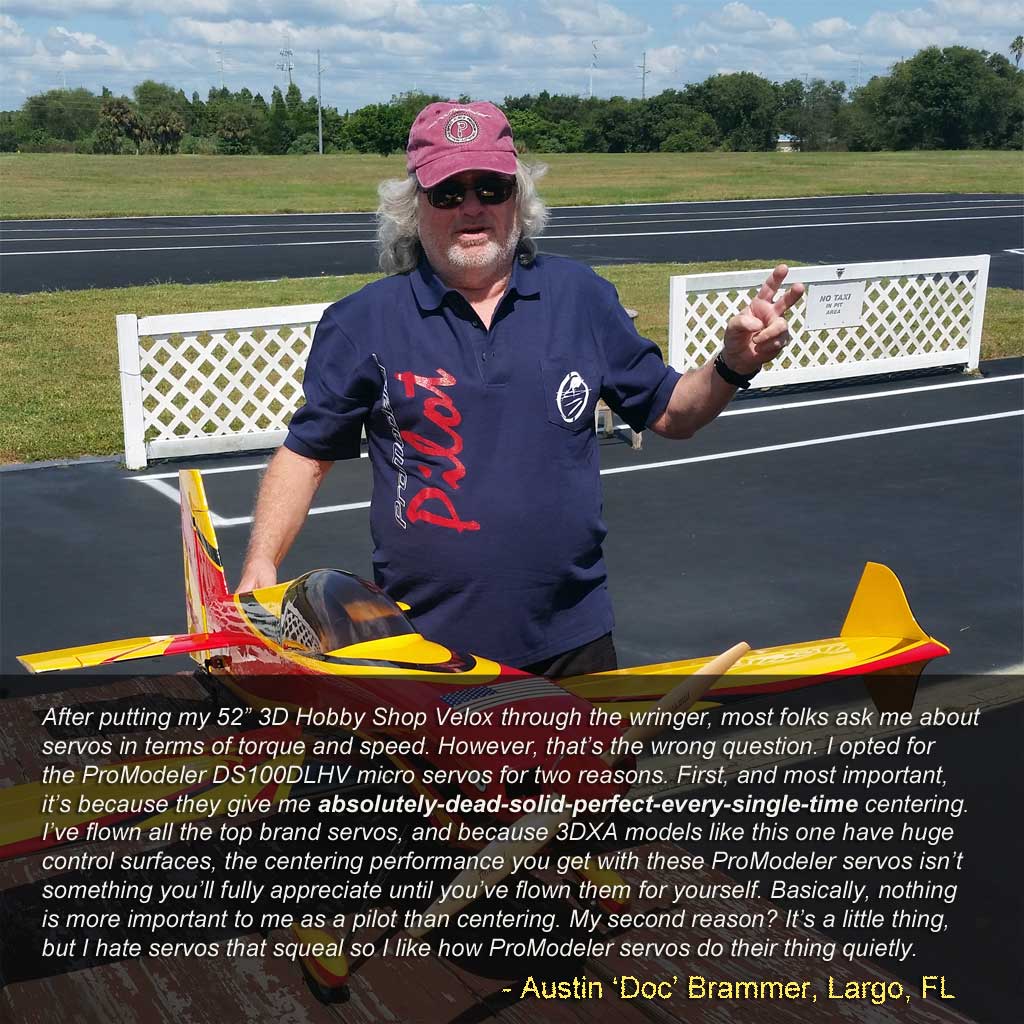
- There's such a thing as stupid spending - real pros only pay for what they can feel.
Who should use use brushless servos? Helicopter pilots are often candidates because the servos are constantly moving, e.g. cyclic servos are moving continuously as the rotor spins at speeds over 2000rpm - non-stop! Tail rotor servos even more so because the gyro is constantly fighting main rotor torque and thus stopping and starting the servo in incessant and minute increments.
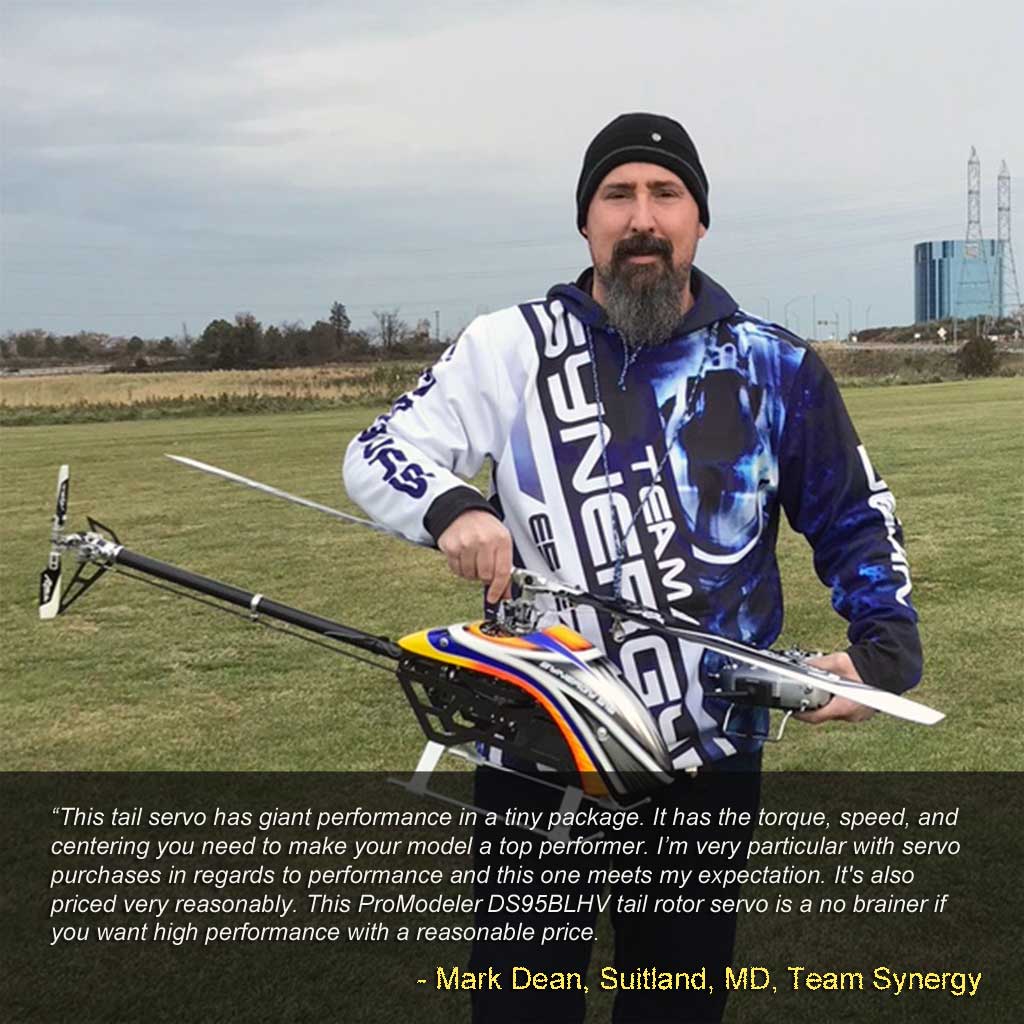
- For helicopters, wise pilots opt for coreless or brushless servos for their speed!
Who else should pony up for the pricey brushless servos? Principally competitor who practice and generally fly or drive a lot - e.g. if you attend fun flies and competition events. Ditto serious drivers who participate in crawling events because brushless can be a no-brainer when driving events that last 6 hours, or more! This is because for these dedicated users, lifespan/brush-wear enters the picture. Brushless servos can deliver decades of solid use, which lowers the cost/year significantly below servos that are less expensive up front. Basically, it comes down to math. If it lasts 5X longer, is it then worth an extra 20%? Everybody makes this decision differently. Don't loose sleep over it but don't lose sight of the big picture either!
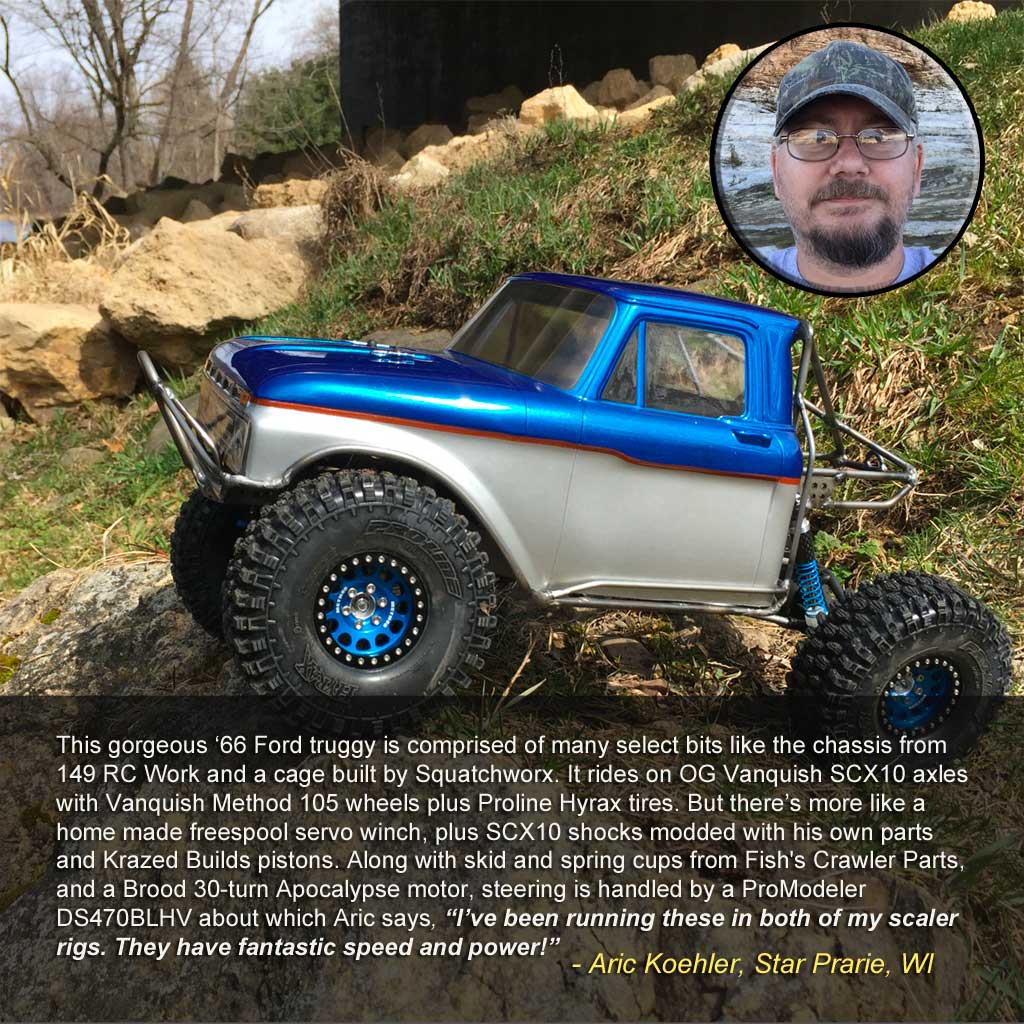
- Some machines fool you into thinking they're works of art - yet are driven and abused!
Anyway, for many folks, brushless servos are viewed as an investment But spending money is personal. This is why we offer all three types of servos, DC, coreless, and brushless (as do our competitors from Japan, China, Europe, and the Philippines).
Us? We're a small shop in Florida hogging aluminum. Yes, we buy Japanese motors and pots because they make the best and there are no outfits in America who offer us these types of motors. Ditto potentiometers where Nobel (Japan) are the best. Period. As for gears, we opt to go to Taiwan. But our niche is that we try to do things better instead of cheaper. Basically, we justify our spot at the feeding trough through quality and attention to detail. Put another way, while there's always room for one more, winning requires two things. First, that you bring a fresh perspective (our quality versus cheaper argument) and second, that people give a damn. Everybody doesn't. Fact. However, for those of you who do, then we offer a compelling product. Also fact.
Anyway, what follows can be viewed as more propaganda because they are examples of how ProModeler brings fresh perspective and adds value. Viewed through jaundiced eyes it's just advertising so skip to the end if you like. However, you should know this; If you see a servo with an aluminum center section, there's not much doubt it's better than one with all-plastic case, agreed? Thing is; all aluminum-center servos aren't the same.
For example, when you eyeball a ProModeler servo - all of them, even our least expensive - you're getting a servo where the center is CNC-machined from a solid billet of 6061-T6 aircraft aluminum. El cheapos are extruded through a die, have screws that pass trhrough the aluminum and thread into plastic. Meanwhile, CNC means a more precise fit of the motor to the case for better cooling, and the screw holes are tapped for machine thread bolts. Just a detail? Sure, but details count!
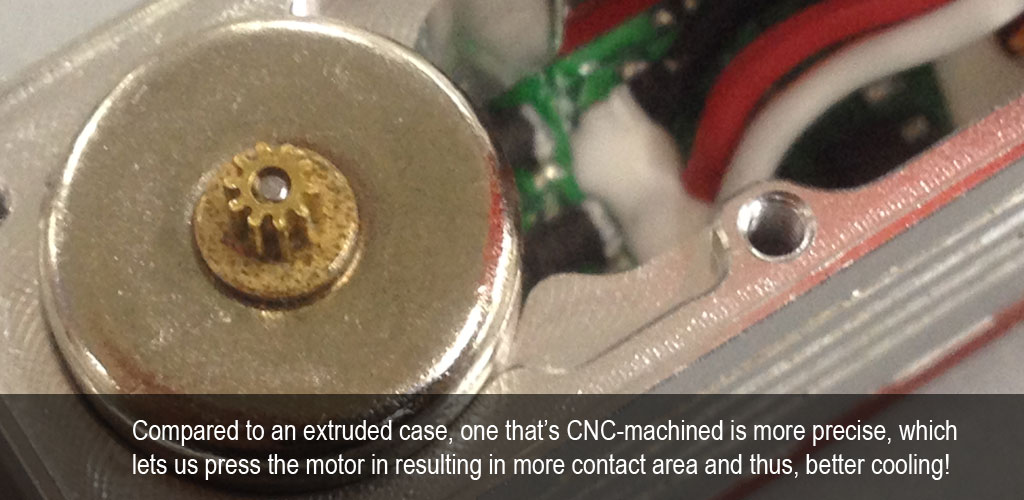
Obviously one place the fit of the motor to the case matters is because a tighter fit means better heat transfer (sheds heat better for cooler running). However, another equally obvious place it matters is due to our milling the cooling fins into the case. Extruded case manufacturers are rarely concerned with engineering so 'if' they'll extrude. 'then' they also usually won't bother to trouble themselves will milling fins into the extrusions, capice? 'The lack of cooling fins is a screaming argument (without even going inside to look) that says this is a cheaply made servo!
Anyway, our center cases are made from a solid billet of 6061-T6 aircraft aluminum. We harp on the value of cooling fins because these help the single hardest working component within the servo shed heat - the motor - which is important to you if you're reading this article! So with a ProModeler servo you benefit from our thinking, e.g. where better is the focus vs. cheaper. Of course, you pay your money and make your choice (but you really do get what you pay for).
Similarly, when you look at ProModeler polymer case components, especially pockets, which accept steel gear shafts and handle heavy loads, you'll see bronze inserts.
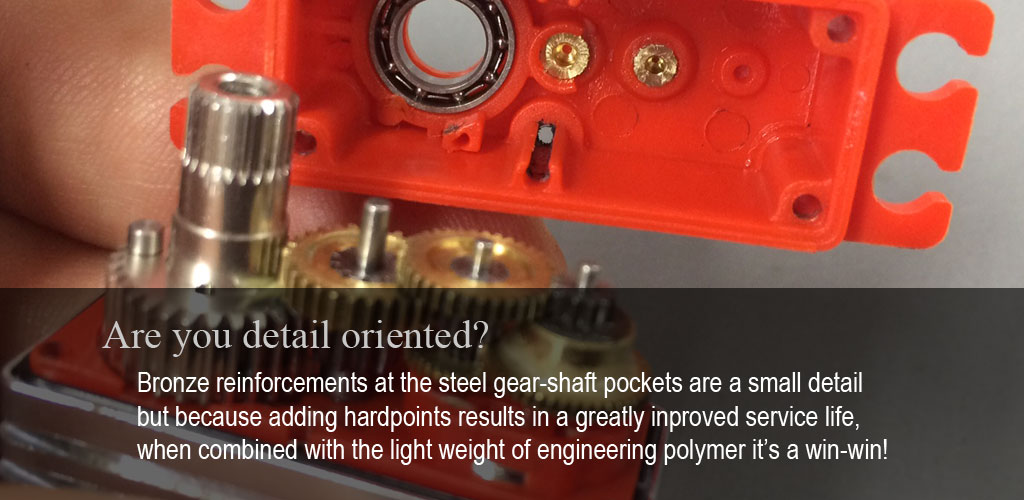
Why the bit of bronze for the insert? Simple, it's to reinforce these high failure wear points. Granted, we may be rednecks living near the swamps of the deep south but we know a thing or two about value. The hard points make ProModeler servos more durable. Even if your money grows on trees, surely you recognize this type of construction is better, agreed? That ProModeler servos deliver more value begins to become compelling versus servos when the goal is always cheaper. Essentially, we don't make el cheapo servos because we don't want to put our reputation on the line!
Robust and durable are two other considerations, which can be generalized as good. An excellent example is when we have competitors using a plastic gear within an otherwise metal gear train. ProModeler servos have all-metal gears.
Moreover, especially in our high performance coreless and brushless products, they're made entirely of steel (like is found in a Ferrari on the track because steel is unmatched by anything for gears). Guess what? Even our least costly servo comes with durable and long lasting all-metal gear trains - no plastic whatsoever!

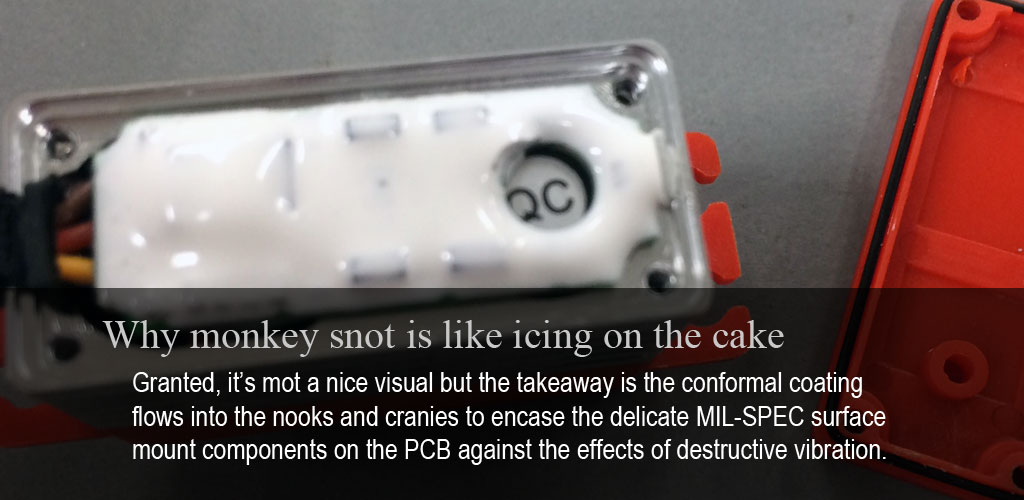
MIL-STDS are nice to have. E.g. against shock and vibration it's better than no certifications, right? This is why ProModeler servos, for example, get a conformal coating (like electronics launched into space) versus maybe a little square of foam padding! Anyway, we call the stuff monkey snot because it's a smelly sticky mess to use but the results? Worth it - totally!
What about trying to be proof against water intrusion? This effort is better than a sharp stick in the eye, right? The point being ProModeler servos are often equipped with 13 o-rings. This is normal so if your choice is between two otherwise similar servos, surely the one with a butt load of o-rings for sealing is better than the one with a few, or none, right? We don't want to say no brainer again because after awhile it gets to be overused - but for your money - we think ProModeler servos are built better and many experienced modelers agree.

Summary:
DC motor equipped servos are least expensive and good enough for 90%
of models. These are the technology as old as Ben Franklin - we kid you
not! And yet, despite being the most cost effective, sometimes it seems
only über savvy modelers know when to opt for them, e.g. when they're
the right choice instead of forking over big dough on servos.

- Into jets? Visit www.rosewoodrc.com - home of the EDF Jet Jam - where this guy's CD
The point we're trying to make is - only - buy fast servos if you need speed. Otherwise, buy the best DC-motor servos you can find because the mere fact the motors are inexpensive doesn't mean they're junk, or poor quality. It is principally an issue of ease of manufacturing that results in DC-motors costing less. So for scale models, even a lot of 3D airplanes - but flown by sport pilots performing gentlemen aerobatics (loops, rolls, stall turns, Immelmann turns, and the occasional Lomcovák - versus some Jason-wannabees trying his hand at terminators, rifle rolls, and parachute who needs the fastest and most powerful (read this as expensive) servos on the market.
High performance models are the product for which coreless motor servos exist. When you're racing an 1/8th scale buggy or truck and it's important to hit the apex of a corner timed perfectly, there's no substitute for speed. Similarly, when performing a low altitude Harrier with rudder, aileron, and elevator servos in a synchronized dance, speed and power are everything! Bottom line? When it comes to speed, coreless and brushless motor servos are a popular answer.
- When only the the best will do, brushless is really the way to go!
What happens when longevity factors in along with speed? Then it's brushless - clearly because the benefits outweigh the drawbacks. The same holds true when 'the best' is part of the equation, e.g. where brushless motors are again the choice. Note; knowing the motors are pricey, we tend to go for the whole enchilada when making these servos, e.g. an all-alloy case, steel gears, etc. because when the choice of folks who are uncompromising in their pursuit of the best in every regard want the best motor, they also want the best gears, and the best case components. The best sums it up.
Closing:
In the end, whether you're facing a budget, or the requirements of the model are guided by a single factor, perhaps torque, the DC-motor servo is probably all that's needed. Many national championships and world events have been won with DC-motor servos. They are a great choice for almost any model. The point is, most modelers can select a DC-motor servo based on torque requirements and few modelers need to spend more than the $50/servo for one of our 360oz-in DS360DLHV servos. For those who do, it's because servo requirements include the speed parameter. Competitors will fall into this category when performing difficult maneuvers often making a coreless servo the best choice. As for those of you for whom a brushless-motor servo is de rigueur, your needs dictate servos for which basically, money is no object. You want the best and are willing to pony up for it! Brushless motor servos are the best money can buy.
If you've made it through this entire article then you're fully equipped to decide what motor is best for you based on what you've learned. We've offered this knowledge nearly for free (we showed you some of our products). This, in hopes you opt for our servos next time - but - also in service of all modelers, e.g. educating you regarding the differences in all servos for the common good - useful info for any and all brands. Anyway, we offer you a solid selections using all three motor types without compromising quality.

- With the experience to pick and choose, brushless for rudder, DL-series for throttle and mixture.
Last thoughts; the motor you select for your servos is serious business, choosing wisely now that you know a bit about the three types: DC, coreless, and brushless is easier after learning about how they're made, and why this affects performance, agreed? Ultimately, knowing what goes into them, how this factors into cost and performance means you're equipped to make better decisions - like a pro does - which is important because as the old saw goes . . . knowledge is power!